Große Motoren
Neben einem Mittleren Motor besitzt dein Roboter auch zwei Große Motoren, die mit den Rädern verbunden sind und somit der Fortbewegung des Fahrzeugs dienen. Auch diese Motoren sollten in der Anschlussansicht aufscheinen und korrekt verkabelt sein.
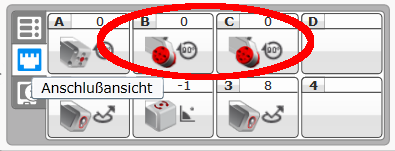
Durch Klick auf den Motor in der Anschlussansicht lassen sich auch hier gewisse Aspekte (Gradzahl oder Umdrehungen der Räder etc.) einblenden.
Während mit dem Block Großer Motor aus der Rubrik Aktion die beiden Motoren einzeln angesprochen werden können, ermöglicht der Programmbaustein Standardsteuerung die koordinierte Ansteuerung der beiden Motoren gemeinsam. Im Textfeld sollten automatisch die beiden richtigen Anschlüsse eingetragen sein.
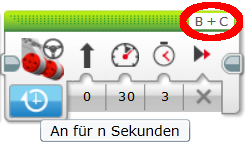
Eingestellt kann auch die Richtung werden, wobei 0 geradeaus bedeutet. Bei Zahlen größer Null zieht der Roboter nach rechts, andernfalls nach links. Für die Leistung können Werte zwischen -100 und +100 eingegeben werden. Bei ersteren fährt der Roboter nach hinten, bei letzteren nach vorne. Im Modus An für n Sekunden lässt sich auch die Zeitspanne bestimmen, in der die Motoren aktiv sein sollen.
Da sich direkt nach dem Programmstart der Roboter bewegen würde, sollte vorher das USB-Kabel gelöst werden. Dafür ist das Projekt im aktuellen Zustand zunächst auf den EV3-Stein zu übertragen, was mit einem Klick auf die Schaltfläche Herunterladen auf der Hardware-Seite erreicht wird.
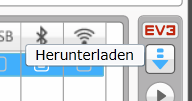
Nur unweit rechts davon auf der Schaltfläche Verbindung trennen ist anschließend die Verbindung per Software zu kappen, ehe das Kabel tatsächlich abgesteckt werden kann.
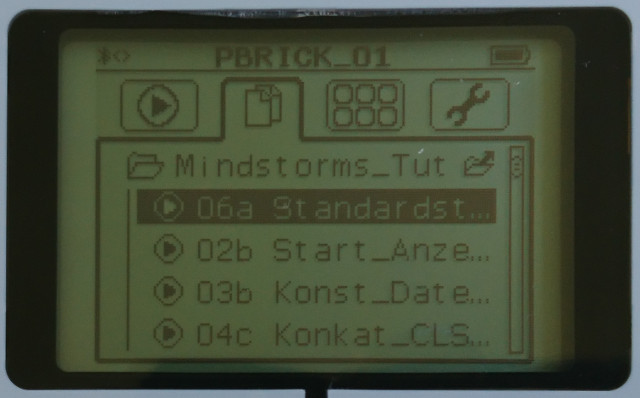
Dann ist das Programm durch Auswahl auf dem EV3-Stein zu starten. Dafür muss das richtige Projekt gewählt werden ...
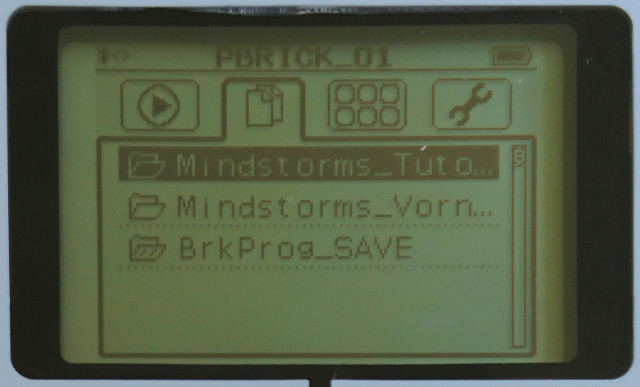
... und anschließend das gewünschte Skript.
Jetzt sollte es nicht mehr allzu schwierig sein, deinen Roboter ein Stück weit fahren zu lassen. Probiere es doch gleich mal aus!