Lichtsensor
Dein Roboter besitzt einen Lichtsensor, mit dem er die Stärke des Lichts vor und unter ihm messen kann. Schwarz reflektiert wenig Licht und führt folglich zu niedrigen Sensorwerten. Für Weiß gilt das Gegenteil.
Bevor du mit dem Programmieren beginnst, solltest du dich vergewissern, das der Sensor richtig angeschlossen ist.

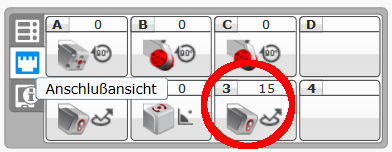
Auf der Hardware-Seite unten rechts findest du die Anschlussansicht, die dir Informationen zu den angeschlossenen Motoren und Sensoren zur Verfügung stellt. Auch deinen Lichtsensor solltest du dort wiederfinden.
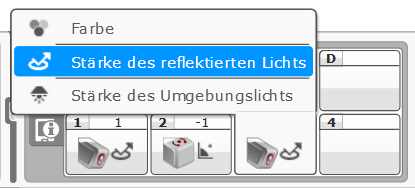
Den Aspekt, unter dem der Lichtsensor ausgelesen werden soll, kannst du durch Klick auf den jeweiligen Sensor in der Anschlussansicht einstellen:
In der Palette findest du den Programmblock Farbsensor unter der Rubrik Sensor. Stelle auch hier den richtigen Modus ein, in diesem Fall Messen - Stärke des reflektierten Lichts. Auch die Nummer des Anschlusses, mit dem der Lichtsensor verbunden ist, ist oben rechts im Textfeld anzugeben.
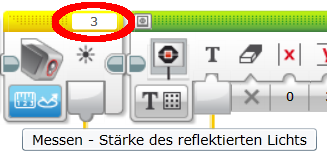
Der gemessene Lichtstärkewert lässt sich dann mithilfe einer Datenleitung verarbeiten.
Wie auch in der Lektion 06 Addition untereinander ist auch in diesem Beispiel der Display nur einmal zu Beginn zu löschen.
Der komplette Code besteht letztlich nur aus wenigen Bausteinen:
