Lichtsensor 2.0
Häufig steht man vor der Notwendigkeit, das reflektierte Licht nicht nur einmal, sondern regelmäßig in verhältnismäßig kurzen Zeitabständen zu messen. In diesem Programmbeispiel erweitern wir dasjenige der vorigen Lektion um die Funktion, den Farbsensor laufend auszulesen. Erst durch Drücken einer Stein-Taste soll das Programm beendet werden.
Falls jemals dein EV3-Brick gar nicht mehr reagiert, kannst du ihn folgendermaßen neu starten: Drücke gleichzeitig die Linke Taste, Mittlere Taste und die Zurück-Taste und lasse die letzte los, sobald das Display erlischt. Erscheint dann auf dem Bildschirm der Text "Starting ..." können auch die Linke und die Mittlere Taste losgelassen werden.
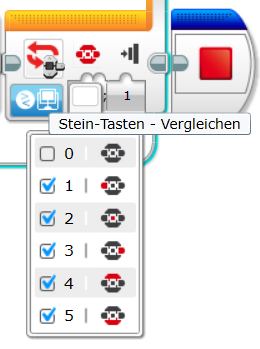
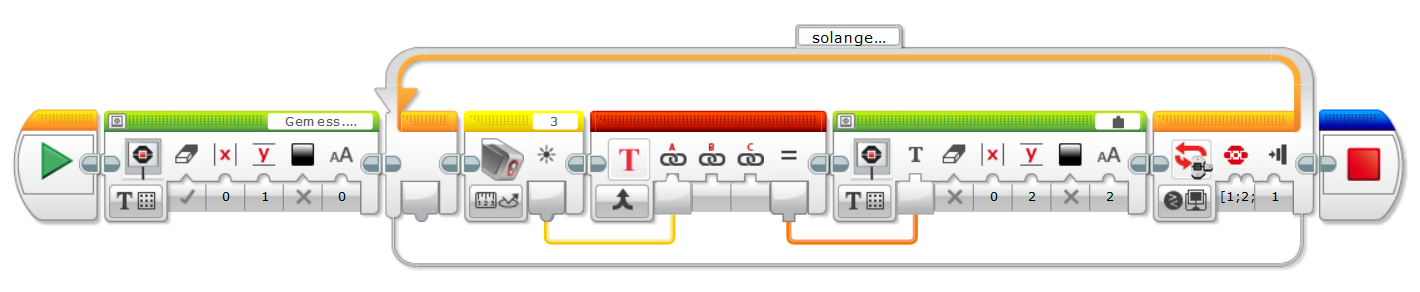
Den Kern dieses Programms bildet eine Schleife, die erst beendet wird, wenn eine Stein-Taste gedrückt wird. Dafür muss der Modus Stein-Tasten - Vergleichen eingestellt und ausgewählt werden, welche Stein-Tasten zur Prüfung herangezogen werden.
Ein Programm lässt sich aber grundsätzlich auch außerplanmäßig auf der Hardware-Seite stoppen.
Innerhalb der Schleife müssen der Lichtsensor ausgelesen und dessen Messdaten an den Display geschickt werden.
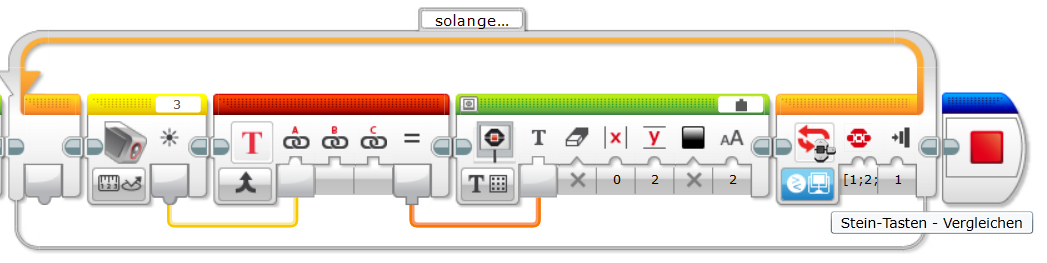
Insgesamt ist der Code nicht viel länger als in der vorigen Lektion:
Es wird nun Zeit, dass dein Roboter lernt, sich selbst zu bewegen.